(!)Due to Microsoft's end of support for Internet Explorer 11 on 15/06/2022, this site does not support the recommended environment.
Instead, please kindly use other browsers like Google Chrome, Microsoft Edge or Mozilla Firefox.
50,000 Stock items for Same Day Ship Out.
All Categories
Categories
- Automation Components
A wide variety of standard and configurable components for factory automation engineers in industries such as automotive, semiconductor, packaging, medical and many more.
- Linear Motion
- Rotary Motion
- Connecting Parts
- Rotary Power Transmission
- Motors
- Conveyors & Material Handling
- Locating, Positioning, Jigs & Fixtures
- Inspection
- Sensors, Switches
- Pneumatics, Hydraulics
- Vacuum Components
- Hydraulic Equipment
- Discharging / Painting Devices
- Pipe, Tubes, Hoses & Fittings
- Modules, Units
- Heaters, Temperature Control
- Framing & Support
- Casters, Leveling Mounts, Posts
- Doors, Cabinet Hardware
- Springs, Shock Absorbers
- Adjusting, Fastening, Magnets
- Antivibration, Soundproofing Materials, Safety Products
- Fasteners
A good selection of accessories such as screws, bolts, washers and nuts that you may need for your daily engineering usage.
- Materials
Browse industrial materials ranging from heat insulating plates, sponges, to metal and plastic materials in different sizes to meet your various applications.
- Wiring Components
A wide variety of wiring parts for connecting and protecting control and PC parts including Connectors, Cables, Electric Wires, Crimping Terminals and more.
- LAN Cables / Industrial Network Cables
- Cables by Application
- Cables with Connectors
- RS232 / Personal Computers / AV Cables
- Wires/Cables
- Connectors (General Purpose)
- Crimp Terminals
- Zip Ties
- Cable Glands
- Cable Bushings/Clips/Stickers
- Screws/Spacers
- Cable Accessories
- Tubes
- Protection Tubes
- Ducts/Wiremolds
- General Purpose Tools
- Dedicated Tools
- Soldering Supplies
- Electrical & Controls
A wide variety of controls and PC parts for electrical engineers including Controls, Powers, PC parts and more.
- Cutting Tools
A wide variety of cutting tools for many uses and work materials including End Mills, Drills, Cutters, Reamers, Turning Tools and more.
- Carbide End Mills
- HSS End Mills
- Milling Cutter Inserts/Holders
- Customized Straight Blade End Mills
- Dedicated Cutters
- Turning Tools
- Drill Bits
- Screw-Hole-Related Tools
- Reamers
- Chamfering / Centering Tools
- Fixtures Related to Cutting Tools
- Step Drills
- Hole Saws
- Clean Key Cutters
- Core Drills (Tip Tools)
- Magnetic Drilling Machine Cutters
- Drill Bits for Electric Drilling Machines
- Woodworking Drill Cutters
- Drills for Concrete
- Processing Tools
A wide variety of tools and supplies used in processing including Machine Tools, Measurement Tools, Grinding and Polishing Supplies and more.
- Material Handling & Storage
A wide variety of goods used in shipment, material handling and warehouse including Tape supplies, Stretch film, Truck, Shelf, Crane and more.
- Tape Supplies
- Cushioning Materials
- Stretch Films
- Cardboard
- Plastic Bags
- PP Bands
- Magic Tapes / Tying Belts
- Rubber Bands
- Strings/Ropes
- Cable Ties
- Tags
- Labelers
- Unpacking Cutters
- Packing Support Equipment
- Cloth Sheets for Packing
- Conveyance/Dolly Carts
- Tool Wagons
- Tool Cabinets / Container Racks
- Lifters / Hand Pallets
- Container Pallets
- Storage Supplies
- Shelves/Racks
- Work Benches
- Suspended Clamps/Suspended Belts
- Jack Winches
- Chain Block Cranes
- Bottles/Containers
- Bicycle Storage Area
- Safety & General Supplies
A large variety of goods for every kind of factories and offices including Protection items, Cleaning supplies, sanitations, office supplies and more.
- Lab & Clean Room Supplies
A large variety of items used in R&D and Clean Room including research Equipment, Laboratory Essentials, Analysis Supplies, Clean Environment-Related Equipment and more.
- Press Die Components
Choose from thousands of standard stamping die components including Punch & Die, Gas Springs, Guide Components, Coil Springs and many more.
- Plastic Mold Components
Browse our wide variety of mold components including Ejector Pins, Sleeves, Leader Components, Sprue Bushings and many more.
- Ejector Pins
- Sleeves, Center Pins
- Core Pins
- Sprue bushings, Gates, and other components
- Date Mark Inserts, Recycle Mark Inserts, Pins with Gas Vent
- Undercut, Plates
- Leader Components, Components for Ejector Space
- Mold Opening Controllers
- Cooling or Heating Components
- Accessories, Others
- Components of Large Mold, Die Casting
- Injection Molding Components
Browse our injection molding components including Heating Items, Couplers, Hoses and more.
- Injection Molding Machine Products
- Accessories of Equipment
- Auxiliary Equipment
- Air Nippers
- Air Cylinders
- Air Chuck for Runner
- Chuck Board Components
- Frames
- Suction Components
- Parallel Air Chuck
- Special Air Chuck
- Chemical for Injection Molding
- Mold Maintenance
- Heating Items
- Heat Insulation Sheets
- Couplers, Plugs, One-touch Joints
- Tubes, Hoses, Peripheral Components
Search by Application
Brands



- Please be informed that our office is closed during the upcoming Labour Day Holiday in 2024. We would also like to inform you that there may be a potential delay in response/shipment from the supplier due to the Japan Golden Week holiday which falls from 29th April to 6th May 2024. Click here for details.
- Please Note our New Address (effective April 1, 2024): 331 North Bridge Rd, #05-01 Odeon 331, Singapore 188720.
Electric Actuator Slider Type Belt Drive LEFB Series Step Motor/Servo Motor

A slider-type electric actuator.
[Features]
· Maximum stroke: 2,000 mm (step motor [24‑V DC servo]).
· Maximum speed: 2,000 mm/s (step motor [24‑V DC servo]).
· Positioning repeatability: ±0.08 mm (step motor [24‑V DC servo]).
· Maximum speed: 2,000 mm/s (AC servo motor).
· Maximum stroke: 3,000 mm (AC servo motor).
· Maximum acceleration/deceleration: 20,000 mm/S2 (AC servo motor).
· Pulse input type, with absolute encoder (AC servo motor).
· Positioning Repeatability: ±0.06 mm (AC servo motor).
(i)Caution
- Refer to the manufacturer's catalog for specification and material details.
- Product images may be representative images only. Refer to the manufacturer's catalog for shape details.
- CAD data is not available for some model numbers.
Part Number
Configured Part Number is shown.
Electric Actuator, Slider Type, Belt Drive LEFB Series Specifications

Electric Actuator, Slider Type, Belt Drive LEFB Series external appearance
Specifications / Step Motor (24‑V DC Servo)
| Model | LEFB16 | LEFB25 | LEFB32 | |||
|---|---|---|---|---|---|---|
| Actuator Specifications | Stroke [mm] Note 1: | 300, 500, 600, 700 800, 900, 1,000 | 300, 500, 600, 700, 800, 900 1,000, 1,200, 1,500, 1,800, 2,000 | 300, 500, 600, 700, 800, 900 1,000, 1,200, 1,500, 1,800, 2,000 | ||
| Work Load [kg] Note 2: | Horizontal | LECP6/LECP1/LECPMJ JXCE1/91/P1/D1 | 1 | 10 | 19 | |
| LECPA | 1 | 5 | 14 | |||
| Speed [mm/s] Note 2: | 48 to 1,100 | 48 to 1,400 | 48 to 1,500 | |||
| Maximum Acceleration/Deceleration [mm/s2] | 3,000 | |||||
| Positioning Repeatability [mm] | ±0.08 | |||||
| Lost Motion [mm] Note 3: | 0.1 or less | |||||
| Lead [mm] | 48 | 48 | 48 | |||
| Impact/Vibration Resistance [m/s2] Note 4: | 50/20 | |||||
| Actuation Type | Belt | |||||
| Guide Type | Linear guide | |||||
| Operating Temperature Range [°C] | 5 to 40 | |||||
| Operating Humidity Range [%RH] | 90 or less (no condensation) | |||||
| Electrical Specifications | Motor Size | □28 | □42 | □56.4 | ||
| Motor type | Step motor (24‑V DC servo) | |||||
| Encoder | Incremental A/B phase (800 pulses/rotation) | |||||
| Rated Voltage [V] | 24 DC ±10% | |||||
| Power Consumption [W] Note 5: | 24 | 32 | 52 | |||
| Standby Power Consumption When Operating [W] Note 6: | 18 | 16 | 44 | |||
| Maximum Instantaneous Power Consumption [W] Note 7: | 51 | 60 | 127 | |||
| Lock Specifications | Type Note 8: | Non-excitation operation (non-magnetizing lock) | ||||
| Holding Force [N] | 4 | 19 | 36 | |||
| Power Consumption [W] Note 9: | 2.9 | 5 | 5 | |||
| Rated Voltage [V] | 24 DC ±10% | |||||
Note 1: Non-standard strokes are manufactured as custom orders.
Note 2: The speed changes according to the controller/driver type and work load. See p. 41 of the SMC catalog ("Speed−Work Load Graph (Guide)") for more details. Furthermore, if the cable length exceeds 5 m, then it will decrease by up to 10% for each 5 m. Cannot be used vertically.
Note 3: A reference value for correcting an error in reciprocal operation.
Note 4: Impact resistance: No malfunction occurred when the actuator was tested with a drop tester in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
Vibration resistance: No malfunction occurred in a test ranging between 45 and 2,000 Hz (1 sweep), performed in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
Note 5: The power consumption (including the controller) is for when the actuator is operating.
Note 6: The standby power consumption when operating (including the controller) is for when the actuator is stopped in the set position during operation.
Note 7: The maximum instantaneous power consumption (including the controller) is for when the actuator is operating. This value can be used for selecting the power supply capacity.
Note 8: With lock only.
Note 9: For an actuator with a lock, add the power consumption for the lock.
Specifications / Servo Motor (24 V DC)
| Model | LEFB16A | LEFB25A | ||
|---|---|---|---|---|
| Actuator Specifications | Stroke [mm] Note 1: | 300, 500, 600, 700 800, 900, 1,000 | 300, 500, 600, 700, 800, 900 1,000, 1,200, 1,500, 1,800, 2,000 | |
| Work Load [kg] Note 2: | Horizontal | 1 | 2 | |
| Speed [mm/s] Note 2: | 5 to 2,000 | 5 to 2,000 | ||
| Maximum Acceleration/Deceleration [mm/s2] | 3,000 | |||
| Positioning Repeatability [mm] | ±0.08 | |||
| Lost Motion [mm] Note 3: | 0.1 or less | |||
| Lead [mm] | 48 | 48 | ||
| Impact/Vibration Resistance [m/s2] Note 4: | 50/20 | |||
| Actuation Type | Belt | |||
| Guide Type | Linear guide | |||
| Operating Temperature Range [°C] | 5 to 40 | |||
| Operating Humidity Range [%RH] | 90 or less (no condensation) | |||
| Electrical Specifications | Motor Size | □28 | □42 | |
| Motor Output [W] | 30 | 36 | ||
| Motor type | Servo motor (24 V DC) | |||
| Encoder | Incremental A/B (800 pulses/rotation) / Z phase | |||
| Rated Voltage [V] | 24 DC ±10% | |||
| Power Consumption [W] Note 5: | 78 | 69 | ||
| Standby Power Consumption When Operating [W] Note 6: | Horizontal 4 | Horizontal 5 | ||
| Maximum Instantaneous Power Consumption [W] Note 7: | 87 | 120 | ||
| Lock Specifications | Type Note 8: | Non-excitation operation (non-magnetizing lock) | ||
| Holding Force [N] | 4 | 19 | ||
| Power Consumption [W] Note 9: | 2.9 | 5 | ||
| Rated Voltage [V] | 24 DC ±10% | |||
Note 1: Non-standard strokes are manufactured as custom orders.
Note 2: See p. 42 of the SMC catalog ("Speed−Work Load Graph (Guide)") for more details. Furthermore, if the cable length exceeds 5 m, then it will decrease by up to 10% for each 5 m.
Note 3: A reference value for correcting an error in reciprocal operation.
Note 4: Impact resistance: No malfunction occurred when the actuator was tested with a drop tester in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
Vibration resistance: No malfunction occurred in a test ranging between 45 and 2,000 Hz (1 sweep), performed in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
Note 5: The power consumption (including the controller) is for when the actuator is operating.
Note 6: The standby power consumption when operating (including the controller) is for when the actuator is stopped in the set position while operating with maximum load.
Note 7: The maximum instantaneous power consumption (including the controller) is for when the actuator is operating. This value can be used for selecting the power supply capacity.
Note 8: With lock only.
Note 9: For an actuator with a lock, add the power consumption for the lock.
Dimensions / Belt Drive
(Units: mm)
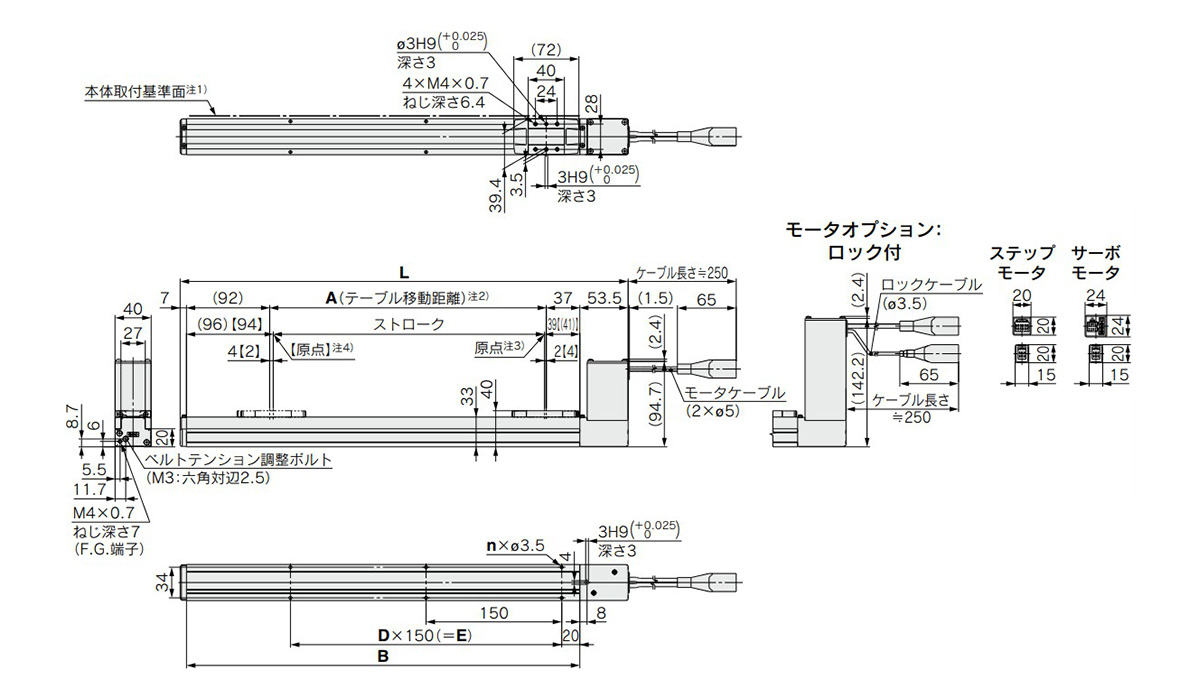
LEFB16 dimensional drawing
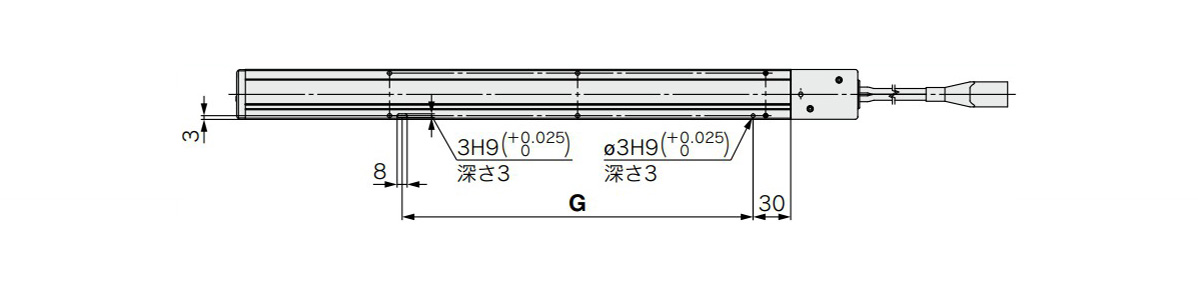
LEFB16 positioning pin hole (Note 5) (Optional): Body bottom surface dimensions
- LEFB16□T-300□/L: 495.5 mm, A: 306 mm, B: 435 mm, n: 6 mm, D: 2 mm, E: 300 mm, G: 280 mm
- LEFB16□T-500□/L: 695.5 mm, A: 506 mm, B: 635 mm, n: 10 mm, D: 4 mm, E: 600 mm, G: 580 mm
- LEFB16□T-600□/L: 795.5 mm, A: 606 mm, B: 735 mm, n: 10 mm, D: 4 mm, E: 600 mm, G: 580 mm
- LEFB16□T-700□/L: 895.5 mm, A: 706 mm, B: 835 mm, n: 12 mm, D: 5 mm, E: 750 mm, G: 730 mm
- LEFB16□T-800□/L: 995.5 mm, A: 806 mm, B: 935 mm, n: 14 mm, D: 6 mm, E: 900 mm, G: 880 mm
- LEFB16□T-900□/L: 1,095.5 mm, A: 906 mm, B: 1,035 mm, n: 14 mm, D: 6 mm, E: 900 mm, G: 880 mm
- LEFB16□T-1000□/L: 1,195.5 mm, A: 1,006 mm, B: 1,135 mm, n: 16 mm, D: 7 mm, E: 1,050 mm, G: 1,030 mm
Note 1: Because of the rounded chamfering, when mounting the actuator using the body mounting reference plane, set the height of the opposite surface or pin to be at least 2 mm or more. (Recommended height: 5 mm)
Note 2: Distance within which the table can move when it returns to origin, etc. Make sure any workpiece mounted on the table does not interfere with the workpieces and equipment, etc., around the table.
Note 3: Position after return to origin.
Note 4: Values within [ ] are for when the direction of return to origin has been changed.
Note 5: When using the body bottom positioning pin holes, do not use the housing B bottom pin hole.
Diagram
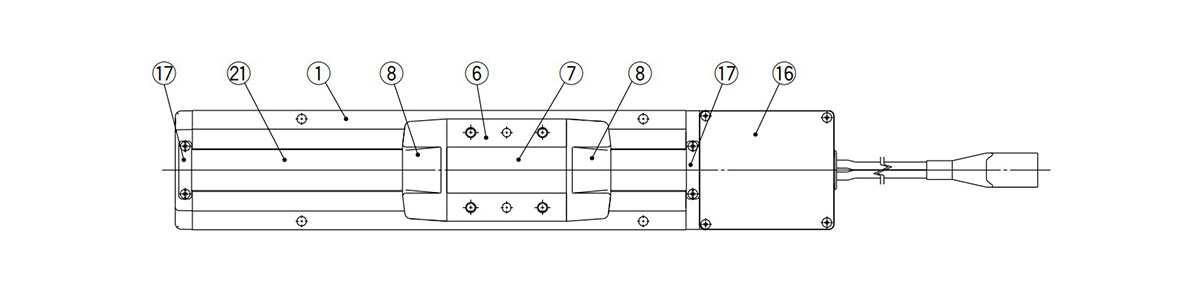
LEFB Series diagram 1
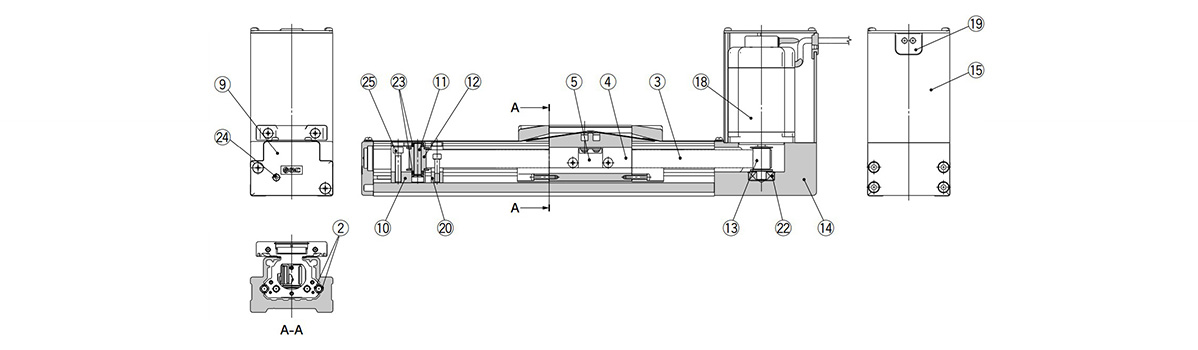
LEFB Series diagram 2
| Number | Part Name | Material | Note |
|---|---|---|---|
| 1 | Body | Aluminum alloy | Anodized |
| 2 | Rail Guide | - | - |
| 3 | Belt | - | - |
| 4 | Belt Holder | Carbon steel | Chromated |
| 5 | Belt Stopper | Aluminum alloy | Anodized |
| 6 | Table | Aluminum alloy | Anodized |
| 7 | Blanking Plate | Aluminum alloy | Anodized |
| 8 | Seal Band Holder | Synthetic resin | - |
| 9 | Housing A | Aluminum diecast | Coating |
| 10 | Pulley Holder | Aluminum alloy | - |
| 11 | Pulley Shaft | Stainless steel | - |
| 12 | End Pulley | Aluminum alloy | Anodized |
| 13 | Motor Pulley | Aluminum alloy | Anodized |
| 14 | Motor Mount | Aluminum alloy | Anodized |
| 15 | Motor Cover | Aluminum alloy | Anodized |
| 16 | End Cover | Aluminum alloy | Anodized |
| 17 | Band Stopper | Stainless steel | - |
| 18 | Motor | - | - |
| 19 | Rubber Bushing | NBR | - |
| 20 | Stopper | Aluminum alloy | - |
| 21 | Dust Seal Band | Stainless steel | - |
| 22 | Bearing | - | - |
| 23 | Bearing | - | - |
| 24 | Tension Adjustment Cap Screw | Chrome molybdenum steel | Chromated |
| 25 | Pulley Retaining Screw | Chrome molybdenum steel | Chromated |
Notes
- *Do not apply load in excess of the specification limits. Select a suitable actuator by work load and allowable moment. If the product is used outside of the specification limits, the unbalanced load applied to the guide will be excessive and have adverse effects, such as creating play on the guide, degrading accuracy and shortening the lifespan of the product.
- *Do not use the product in applications where excessive external force or impact force is applied to it. Doing so can cause the product to malfunction.
- *Refer to the SMC catalog for product information other than what is detailed above.
- *The product image is a representative image only.
| Part Number | Standard Unit Price | Minimum order quantity | Volume Discount | Days to Ship | Stroke (mm) | Max. Transportable Mass Range (Horizontal) (kg) | Max. Transportable Mass (Horizontal) (kg) | I/O Module | Table Width W1 (mm) | Table Length L1 (mm) | Size | Motor type | Motor options | Actuator/cable type | Actuator cable length (m) | Controller/driver type | I/O cable length / communication plug (m) | Controller/driver mounting method |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
- | 1 Piece(s) | Quote | 1,000 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 1 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | With lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | With lock | Standard cable | 1 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 300 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 1 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 300 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 300 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 300 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 500 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 500 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Straight type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 500 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 500 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 500 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 500 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Straight type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 600 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 600 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 700 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | Without cable (without communication plug connector) | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 900 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 900 | 0~2.0 | 1 | CC-Link | 39.4 | 72 | 16 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 1 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 3 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 5 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 8 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Straight type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | Straight type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | With lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,000 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | With lock | Standard cable | 5 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 3 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 3 | LECPMJ | Straight type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 5 | LECPMJ | Without cable (without communication plug connector) | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 5 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 8 | LECPMJ | Without cable (without communication plug connector) | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 8 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 8 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 15 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
SGD 2,065.58 | 1 Piece(s) | 46 Day(s) | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 3 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Without cable (without communication plug connector) | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,200 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 5 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Without cable | Without cable | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 5 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 5 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 5 | LECPMJ | T-branch type communication plug connector | DIN rail mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Robotic cable (flex-resistant cable) | 8 | LECPMJ | T-branch type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Without cable (without communication plug connector) | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | Straight type communication plug connector | Screw mounting type | ||
- | 1 Piece(s) | Quote | 1,500 | 5.1~10.0 | 10 | CC-Link | 50 | 102 | 25 | Step motor (24‑V DC servo) | Without lock | Standard cable | 1 | LECPMJ | T-branch type communication plug connector | Screw mounting type |
Loading...
Basic Information
| Main Body, Peripheral Components | Main Body | Type | Slider | Drive Method | Belt |
|---|---|---|---|---|---|
| Guide | Provided | Lead(mm) | 48 | Input Power Supply | DC24V |
| Position Detection | Incremental | Brake | Not Provided | Noise Filter | Not Provided |
| Operating Environment | Standard | Positioning Repeatability(µm) | ±80 | Maximum Velocity(mm/sec) | 3,000 |
Specification/Dimensions
-
Stroke(mm)
-
Max. Transportable Mass Range (Horizontal)(kg)
- 0~2.0
- 2.1~5.0
- 5.1~10.0
- 10.1~20.0
-
Max. Transportable Mass (Horizontal)(kg)
-
Table Width W1(mm)
-
Table Length L1(mm)
-
Size
- 16
- 25
- 32
-
Motor type
- Servo motor (24 V DC)
- Step motor (24‑V DC servo)
-
Motor options
- With lock
- Without lock
-
Actuator/cable type
-
Actuator cable length(m)
- 1
- 3
- 5
- 8
- 10
- 15
- 20
- Without cable
-
Controller/driver type
-
I/O cable length / communication plug(m)
- 1
- 3
- 5
- Straight type communication plug connector
- T-branch type communication plug connector
- Without cable (without communication plug connector)
-
Controller/driver mounting method
- DIN rail mounting type
- Screw mounting type
-
type
- LEFB
-
I/O Module
- NPN
- PNP
- CC-Link
- Not Provided
-
CAD
- 2D
- 3D
Days to Ship
-
- All
- 22 Day(s) or Less
- 31 Day(s) or Less
- 41 Day(s) or Less
- 46 Day(s) or Less
Specify Alterations
- The specifications and dimensions of some parts may not be fully covered. For exact details, refer to manufacturer catalogs .
Tech Support
- Factory Automation, Electronics, Tools, & MRO (Maintenance, Repair and Operations)
- Tel:(65) 6733 7211 / FAX:(65) 6733 0211
- 9:00am - 6:00pm (Monday - Friday)
- Technical Inquiry
Payment Method
- Credit Card
- PayPal
- Bank Transfer
Social Media
MISUMI Contact
Copyright © MISUMI Corporation All Rights Reserved.
How can we improve?
How can we improve?